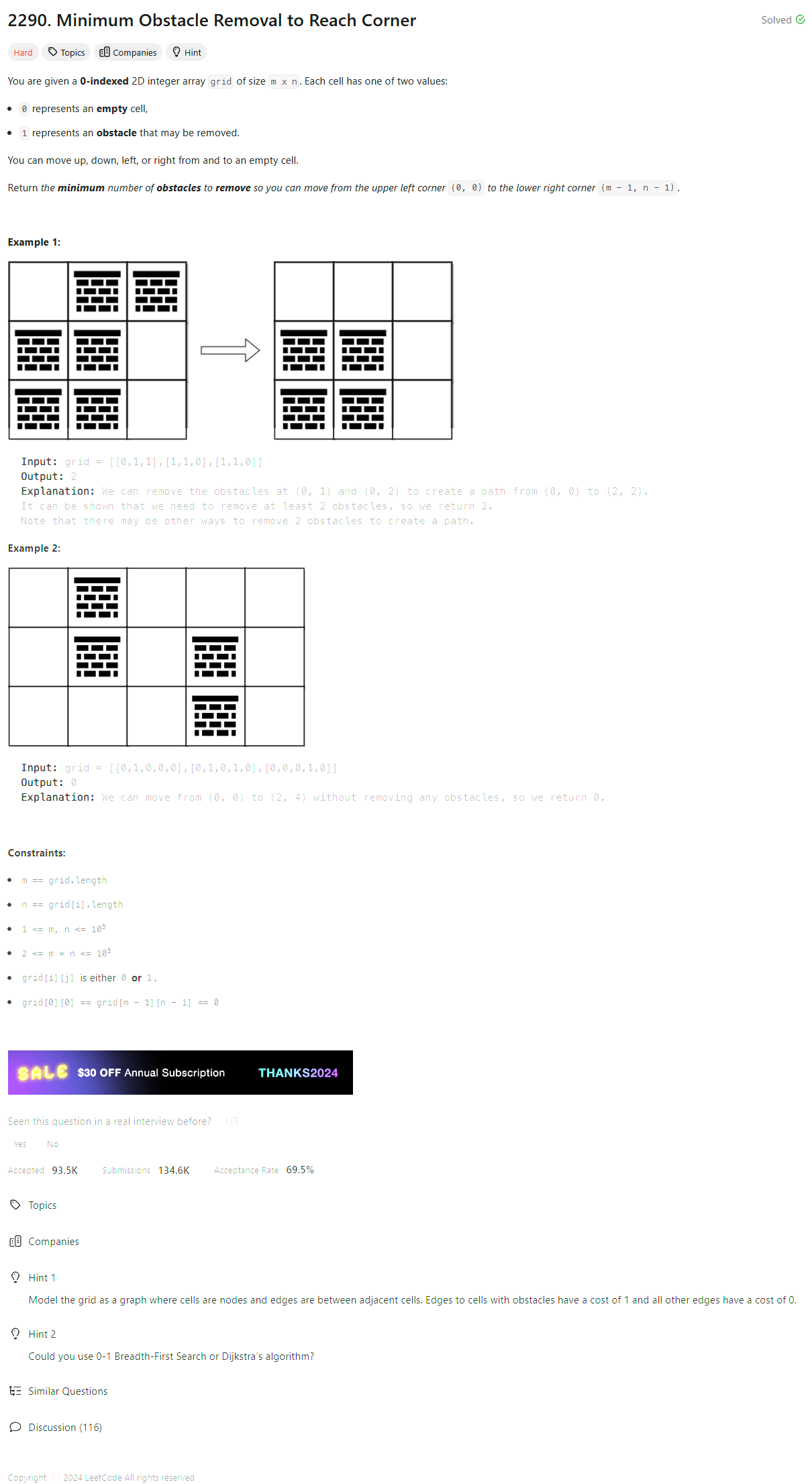
Problem of The Day: Minimum Obstacle Removal to Reach Corner
Problem Statement
Notes:
- need to review Dijkstra and BFS 0-1 approach
- set to inf on empty cell
Dijkstra Algorithm Template
import heapq
from collections import defaultdict
from typing import List, Tuple, Dict
def dijkstra(n: int, edges: List[Tuple[int, int, int]], start: int) -> Dict[int, int]:
"""
Implements Dijkstra's Algorithm to find the shortest path from a starting node.
Parameters:
- n: int -> Number of nodes in the graph.
- edges: List[Tuple[int, int, int]] -> List of edges represented as (u, v, weight).
- start: int -> Starting node for Dijkstra's algorithm.
Returns:
- distances: Dict[int, int] -> Dictionary where key is the node and value is the shortest distance from start.
"""
# Build the graph as an adjacency list
graph = defaultdict(list)
for u, v, weight in edges:
graph[u].append((v, weight))
graph[v].append((u, weight)) # Uncomment this line if the graph is undirected.
# Min-heap to prioritize nodes with smallest distance
min_heap = [(0, start)] # (distance, node)
distances = {i: float('inf') for i in range(n)} # Initialize distances to infinity
distances[start] = 0 # Distance to the start node is 0
while min_heap:
curr_dist, curr_node = heapq.heappop(min_heap)
# Skip if a better distance is already found
if curr_dist > distances[curr_node]:
continue
# Relaxation step
for neighbor, weight in graph[curr_node]:
distance = curr_dist + weight
if distance < distances[neighbor]:
distances[neighbor] = distance
heapq.heappush(min_heap, (distance, neighbor))
return distances
# Example usage
if __name__ == "__main__":
# Example input
n = 5 # Number of nodes (0 to 4)
edges = [
(0, 1, 2),
(0, 2, 4),
(1, 2, 1),
(1, 3, 7),
(2, 4, 3),
(3, 4, 1)
]
start = 0
shortest_distances = dijkstra(n, edges, start)
print("Shortest distances from node", start, ":", shortest_distances)
Key Concepts
- Graph Representation: The graph is represented as an adjacency list for efficiency.
- Min-Heap: A priority queue is used to fetch the next node with the smallest tentative distance.
- Distance Relaxation: Update the shortest distance to a node when a better path is found.
Usage
- Replace
edgeswith your graph data. - Adjust the graph representation if the input uses a different format, e.g., adjacency matrix.
- The return value
distancescontains the shortest distance from the start node to all other nodes.
Editorial Solution for this problem
Approach 1: Dijkstra’s Algorithm
class Solution:
# Directions for movement: right, left, down, up
directions = [(0, 1), (0, -1), (1, 0), (-1, 0)]
def minimumObstacles(self, grid):
# Helper method to check if the cell is within the grid bounds
def _is_valid(row, col):
return 0 <= row < len(grid) and 0 <= col < len(grid[0])
m, n = len(grid), len(grid[0])
# Initialize distance matrix with infinity (large value)
min_obstacles = [[float("inf")] * n for _ in range(m)]
# Start from the top-left corner, accounting for its obstacle value
min_obstacles[0][0] = grid[0][0]
pq = [(min_obstacles[0][0], 0, 0)] # (obstacles, row, col)
while pq:
obstacles, row, col = heapq.heappop(pq)
# If we've reached the bottom-right corner, return the result
if row == m - 1 and col == n - 1:
return obstacles
# Explore all four possible directions from the current cell
for dr, dc in self.directions:
new_row, new_col = row + dr, col + dc
if _is_valid(new_row, new_col):
# Calculate the obstacles removed if moving to the new cell
new_obstacles = obstacles + grid[new_row][new_col]
# Update if we've found a path with fewer obstacles to the new cell
if new_obstacles < min_obstacles[new_row][new_col]:
min_obstacles[new_row][new_col] = new_obstacles
heapq.heappush(pq, (new_obstacles, new_row, new_col))
return min_obstacles[m - 1][n - 1]
Approach 2: 0-1 Breadth-First Search (BFS)
class Solution:
# Directions for movement: right, left, down, up
_directions = [(0, 1), (0, -1), (1, 0), (-1, 0)]
def minimumObstacles(self, grid):
# Helper method to check if the cell is within the grid bounds
def _is_valid(row, col):
return 0 <= row < len(grid) and 0 <= col < len(grid[0])
m, n = len(grid), len(grid[0])
# Distance matrix to store the minimum obstacles removed to reach each cell
min_obstacles = [[float("inf")] * n for _ in range(m)]
min_obstacles[0][0] = 0
deque_cells = deque([(0, 0, 0)]) # (obstacles, row, col)
while deque_cells:
obstacles, row, col = deque_cells.popleft()
# Explore all four possible directions from the current cell
for dr, dc in self._directions:
new_row, new_col = row + dr, col + dc
if _is_valid(new_row, new_col) and min_obstacles[new_row][
new_col
] == float("inf"):
if grid[new_row][new_col] == 1:
# If it's an obstacle, add 1 to obstacles and push to the back
min_obstacles[new_row][new_col] = obstacles + 1
deque_cells.append((obstacles + 1, new_row, new_col))
else:
# If it's an empty cell, keep the obstacle count and push to the front
min_obstacles[new_row][new_col] = obstacles
deque_cells.appendleft((obstacles, new_row, new_col))
return min_obstacles[m - 1][n - 1]