Problem of The Day: Walking Robot Simulation
Problem
Intuition
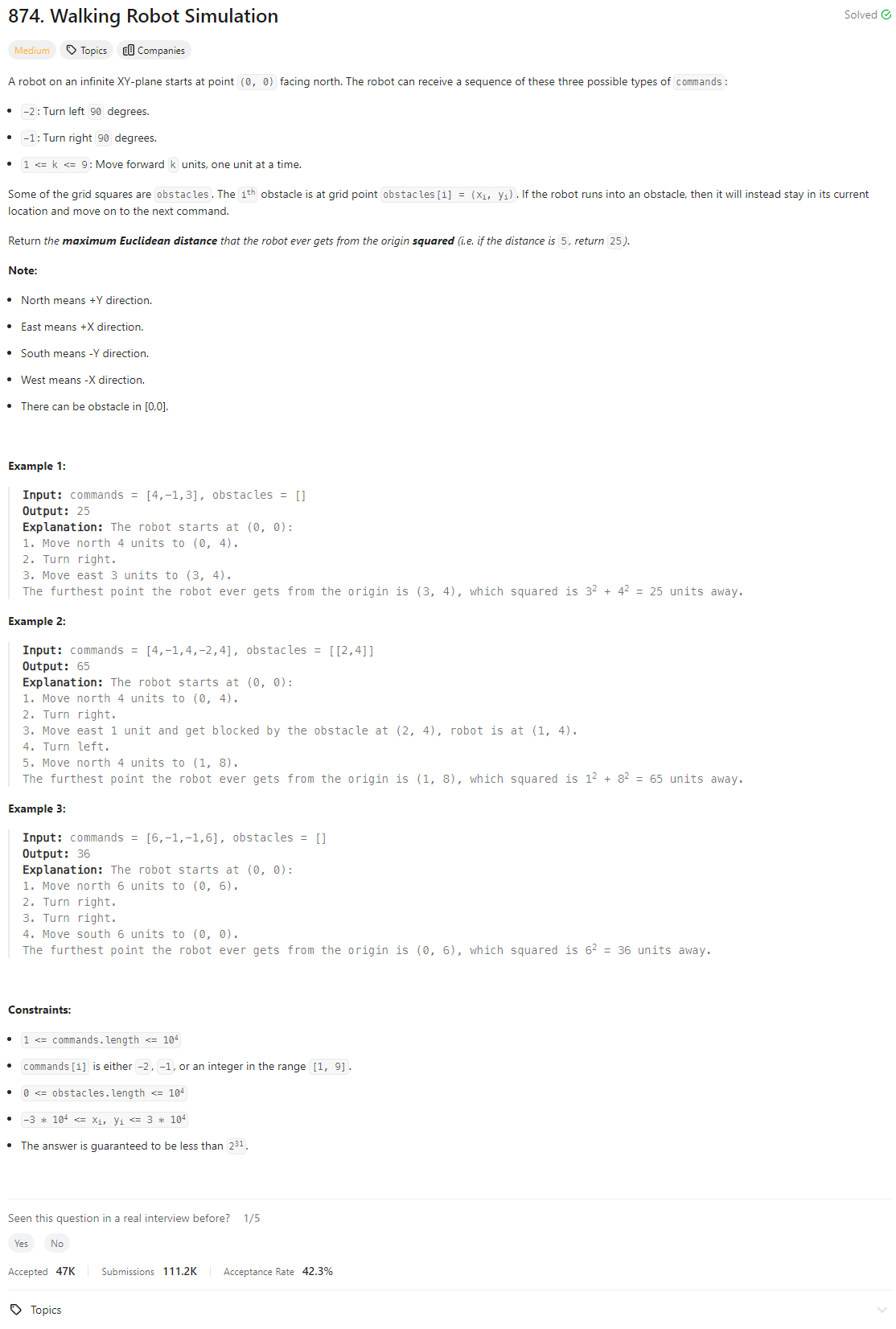
The robot is controlled by a sequence of commands and should avoid obstacles. We need to simulate its movement step by step, keeping track of its position and direction, while checking for obstacles.
Approach
We start with the robot at position (0, 0) facing north. We can use a set to store obstacles for O(1) lookup. The robot’s movement direction can be controlled by a set of booleans (north, south, west, east), which change based on the left and right turns.
For every movement command:
- If the command is a turn (
LEFTorRIGHT), we update the direction accordingly. - If the command is a forward move, we check each step until either the number of steps is completed or the robot encounters an obstacle.
We calculate the square of the Euclidean distance from the origin for each new position and track the maximum distance the robot reaches.
Complexity
-
Time complexity:
The time complexity is \(O(k + n)\), where \(k\) is the number of commands and \(n\) is the number of obstacles. For each command, we perform a constant amount of work, and the obstacle lookups take O(1) time due to the set. -
Space complexity:
The space complexity is \(O(n)\) because we need to store all the obstacles in a set for O(1) lookup.
Code
class Solution:
def robotSim(self, commands: List[int], obstacles: List[List[int]]) -> int:
x, y = 0, 0
LEFT = -2
RIGHT = -1
is_north = True
is_south = False
is_west = False
is_east = False
move_y = 1
move_x = 0
res = 0
obstacle_set = set(map(tuple, obstacles)) # important: without this we will get TLE
for command in commands:
if is_north:
if command == RIGHT:
move_x = 1
is_east = True
is_south = is_west = is_north = False
move_y = 0
if command == LEFT:
move_x = -1
is_west = True
is_south = is_east = is_north = False
move_y = 0
elif is_south:
if command == RIGHT:
move_x = -1
is_west = True
is_south = is_east = is_north = False
move_y = 0
if command == LEFT:
move_x = 1
is_east = True
is_south = is_west = is_north = False
move_y = 0
elif is_west:
if command == RIGHT:
move_y = 1
is_north = True
is_south = is_east = is_west = False
move_x = 0
if command == LEFT:
move_y = -1
is_south = True
is_north = is_east = is_west = False
move_x = 0
elif is_east:
if command == RIGHT:
move_y = -1
is_south = True
is_north = is_east = is_west = False
move_x = 0
if command == LEFT:
move_y = 1
is_north = True
is_south = is_east = is_west = False
move_x = 0
if command != LEFT and command != RIGHT:
next_x, next_y = x, y
for i in range(1, command + 1):
new_x = x + (move_x * i)
new_y = y + (move_y * i)
if (new_x, new_y) in obstacle_set:
break
next_x, next_y = new_x, new_y
x, y = next_x, next_y
res = max(res, x*x + y*y)
return res
Editorial
class Solution:
def __init__(self):
self.HASH_MULTIPLIER = (
60001 # Slightly larger than 2 * max coordinate value
)
def robotSim(self, commands: List[int], obstacles: List[List[int]]) -> int:
# Store obstacles in an set for efficient lookup
obstacle_set = {self._hash_coordinates(x, y) for x, y in obstacles}
# Define direction vectors: North, East, South, West
directions = [(0, 1), (1, 0), (0, -1), (-1, 0)]
x, y = 0, 0
max_distance_squared = 0
current_direction = 0 # 0: North, 1: East, 2: South, 3: West
for command in commands:
if command == -1: # Turn right
current_direction = (current_direction + 1) % 4
continue
if command == -2: # Turn left
current_direction = (current_direction + 3) % 4
continue
# Move forward
dx, dy = directions[current_direction]
for _ in range(command):
next_x, next_y = x + dx, y + dy
if self._hash_coordinates(next_x, next_y) in obstacle_set:
break
x, y = next_x, next_y
max_distance_squared = max(max_distance_squared, x * x + y * y)
return max_distance_squared
# Hash function to convert (x, y) coordinates to a unique integer value
def _hash_coordinates(self, x: int, y: int) -> int:
return x + self.HASH_MULTIPLIER * y